

A-3.1.3 Verfahren Elektromagnetik (+ TDM)
1 Einsatzbereiche von Metalldetektoren
|
Abb. A-3.1-23: Minensuchgerät MINEX 2FD 4.500 der Firma Förster (Foto: Förster)
|
Metalldetektoren, auch unter der Bezeichnung Minensuchgeräte bekannt, dienen zur Lokalisierung von elektrisch leitfähigen Gegenständen im Erdboden oder im Wasser in Abhängigkeit von ihrem Metallanteil bis zu einer Tiefe von ca. 40 cm. Damit finden sie Verwendung bei der Suche nach Waffen und anderen Gegenständen, bei den Sicherheits-, Zoll- und Grenzbehörden und bei der Suche nach Minen und Blindgängern im militärischen und humanitären Bereich und in der Kampfmittelräumung. In letzter Zeit kommen auch immer mehr sog. Großschleifen zum Einsatz. Sie besitzen eine gegenüber den klassischen Minensuchgeräten wesentlich größere Erkundungstiefe und eignen sich insbesondere zur Ortung von Blindgängern. Metalldetektoren (Abb. A-3.1-23) sind leichte, tragbare Geräte, die ein berührungs- und zerstörungsfreies Messen ermöglichen. Sie sind einfach handhabbar, schnell arbeitsbereit, hoch empfindlich, durch eine Person bedienbar, erlauben einen großen Messfortschritt, haben einen geringen Energiebedarf und arbeiten mit hoher Genauigkeit. |

2 Grundlagen
2.1 Messverfahren
Metalldetektoren arbeiten nach dem aktiven Ortungsprinzip, d. h. im Suchgerät wird ein schwaches hochfrequentes elektromagnetisches Feld erzeugt und durch geeignete Spulen abgestrahlt. Beim Auftreffen dieses Feldes auf metallische Gegenstände entstehen an deren Oberflächen durch Induktion Wirbelströme.
Die am weitesten verbreiteten Metallortungsverfahren in der Kampfmittelräumung sind:
- das Sinus- oder Dämpfungsverfahren,
- das Pulsinduktionsverfahren und
- das Zweifrequenzverfahren.
2.2 Physikalische und messtechnische Grundlagen der Verfahren
Wirbelstrom
Der Wirbelstrom ist ein quellenloser Strom und entsteht durch Bewegung eines elektrischen Leiters in einem inhomogenen Magnetfeld oder durch ein magnetisches Wechselfeld in einem ruhenden elektrischen Leiter. Sein Erscheinungsbild ist in Wirbeln fließender elektrischer Strom an der Oberfläche des Leiters. Wirbelstrom erzeugt wie andere Ströme auch ein magnetisches Feld, das dem Erzeugerfeld entgegengerichtet ist und dieses somit abschwächt. Dadurch entsteht im Erzeugerfeld ein Energieverlust.
Die Messverfahren
Beim Dämpfungsverfahren sendet man ein hochfrequentes magnetisches Feld (Primärfeld) geringer Leistung in den Erdboden. Dabei bildet sich infolge der entstehenden Wirbelströme vom metallischen Gegenstand ausgehend ein Sekundärfeld, das sich mit dem Primärfeld überlagert (Abb. A-3.1-24). Da es dem Primärfeld entgegengesetzt gerichtet und geringer ist, wird dieses abgeschwächt (gedämpft). Durch die elektronische Einrichtung des Gerätes wird die Abschwächung in ein akustisches Signal umgewandelt und gleichzeitig das Primärfeld so verstärkt, dass der Energieverlust kompensiert wird.
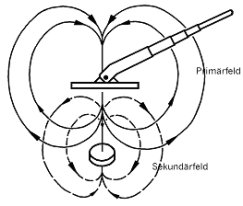
Abb. A-3.1-24: Primär- und Sekundärfeld bei aktiven Ortungsverfahren
Allerdings erfolgt die Induktion der Wirbelströme nur solange, wie eine Relativbewegung zwischen dem Primärfeld und dem Störkörper stattfindet. Verharrt die Suchspule an einem Ort, bricht das Signal nach kurzer Zeit zusammen, weil nach dem Arbeitsprinzip des Detektors das Primärfeld automatisch verstärkt wird. Somit wird die jeweilige Störgröße ausgeregelt. Das bedeutet, Metalldetektoren dieser Bauart müssen ständig in Bewegung gehalten werden, um einen Störkörper zu orten. Man spricht deshalb vom dynamischen Suchprinzip.
Neben diesem Nachteil birgt das Dämpfungsverfahren aber auch gewisse Vorteile in sich. Beim Einsatz des Detektors in unmittelbarer Nähe großer homogener Störquellen, wie z. B. Eisenbahnschienen, Metallzäunen, Leitplanken oder auch Versorgungsleitungen, kann nach Kompensation des Detektors auf diese Hintergrundstörung in einem bestimmten Abstand parallel dazu gearbeitet werden. Das gleiche Prinzip kann auch beim Absuchen von Flächen um größere Störkörper angewendet werden, allerdings muss die Suche dann kreisförmig um diesen Körper erfolgen.
Das Pulsinduktionsverfahren basiert ebenfalls auf der Grundlage der Induktion von Wirbelströmen in einem elektrisch leitfähigen Störkörper. Der Unterschied zum Dämpfungsverfahren besteht darin, dass hier eine hochfrequente Impulsfolge zum Aufbau des Primärfeldes genutzt wird. Die Suchspule dient hier gleichzeitig als Sende- und Empfangsspule.
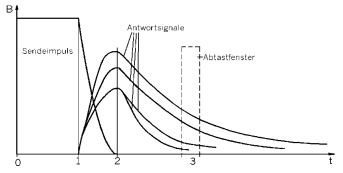
Abb. A-3.1-25: Signale beim Pulsinduktionsverfahren
Die Funktionsweise dieses Verfahrens kann folgendermaßen erklärt werden (Abb. A-3.1-25):
Zum Zeitpunkt 0 erfolgt das Einschalten des Sendeimpulses. Er baut sofort sein Magnetfeld in voller Stärke auf. Zum Zeitpunkt 1 wird der Sendeimpuls wieder abgeschaltet und sein Magnetfeld bricht verzögert zusammen (Zeitpunkt 2). In dieser Zeit hat sich das durch die Wirbelströme induzierte Sekundärfeld (Antwortsignal) aufgebaut und seine maximale Größe erreicht, danach fällt es exponentiell wieder ab.
Die Abklingkurve des transienten Signals beinhaltet sowohl die Induktivität des Metallobjektes als auch die Leitfähigkeit des umgebenden Bodens. Eine geringe Leitfähigkeit (erhöhter spezifischer Widerstand) bewirkt wegen der ohmschen Verluste das schnelle Abklingen des induzierten Wirbelstromes. Da die Bodenleitfähigkeit gegenüber der Leitfähigkeit der darin befindlichen Metalle um Größenordnungen kleiner ist, trifft der durch die Leitfähigkeit des Bodens bewirkte Anteil im Messsignal zeitlich deutlich vor dem der Metalle ein. Diese Eigenschaft wird für die Auswahl eines geeigneten Zeitfensters genutzt, um den Einfluss der Metallobjekte auf das Messsignal nahezu unabhängig vom Beitrag des umgebenden Bodens zu gewinnen.
Der Verlauf des abfallenden Signals wird in der Pause zwischen zwei Impulsen durch ein bei verschiedenen Gerätetypen verschiebbares Abtastfenster (Zeitpunkt 3) gemessen und in einer elektronischen Schaltung ausgewertet. Neuere Geräte werten mehrere Zeitfenster (4 und mehr) aus und erfassen damit den gesamten Verlauf der Abklingkurve. Damit lässt sich eine optimale Auswertung der Daten erreichen.
Wesentlich beim Pulsinduktionsverfahren ist, dass durch das ständige Pulsieren des Signals mit dieser Geräteart eine ständige Bewegung des Suchgerätes nicht mehr notwendig ist. Der Detektor kann beim Suchvorgang ruhig gehalten werden und zeigt dabei trotzdem vorhandene Störungen an. Man spricht bei diesen Geräten vom statischen Suchprinzip.
Der Nachteil des Pulsinduktionsverfahrens besteht jedoch darin, dass die Ortungsmöglichkeit von schwachen Störsignalen in unmittelbarer Nähe von starken Störkörpern durch entstehende Überlagerungen nicht immer gegeben bzw. stark eingeschränkt ist. Untersuchungen und Modellrechnungen in den letzten Jahren haben ergeben, dass bestimmte Signalgrößen des Auswertesignals (z. B. die zeitliche Verzögerung, die Amplitude und auch der Neigungswinkel des abklingenden Signals) Aussagen zur Materialart sowie zur Größe und Tiefe des Störkörpers enthalten. Es ist sehr wahrscheinlich, dass durch weiteren Erkenntnisgewinn noch wesentliche Detektionsverbesserungen zu erzielen sind. In letzter Zeit haben Versuche und auch Erprobungen mit Großschleifengeräten, die mit dem Pulsinduktionsverfahren arbeiten, stattgefunden und es wurden wesentlich größere Tiefen bei der Sondierung erreicht.
Auch das Zweifrequenzverfahren nutzt die Möglichkeit der Induktion von Wirbelströmen in einem elektrisch leitfähigen Störkörper aus. Bei diesem Verfahren wird ein aus drei Spulen bestehendes Spulensystem benutzt: eine konzentrische Primärspule sowie zwei halbkreisförmige Sekundärspulen (Spulenhälften). Die Primärspule sendet kontinuierlich ein Signal aus zwei unterschiedlich hohen, speziell ausgesuchten Frequenzen aus. Durch die Induktionswirkung im Störkörper und deren Rückwirkung auf das Spulensystem ändert sich der Scheinwiderstand (Impedanz) der Spule (Abb. A-3.1-26). Scheinwiderstände setzen sich aus einem Real- und einem Imaginärteil zusammen. Die Imaginärteile der Scheinwiderstände differieren bei den verwendeten Frequenzen für alle elektrisch leitfähigen Materialien so stark, dass sie zu einer Auswertung herangezogen werden können. Dagegen ist der Unterschied der Imaginärteile der Scheinwiderstände von elektrisch schwächer leitfähigen Materialien (z. B. metallhaltige Böden oder auch Salzwasser) äußerst gering. Eventuell doch vorhandene Differenzen können durch elektronische Phasenverschiebungen zusätzlich unterdrückt werden.
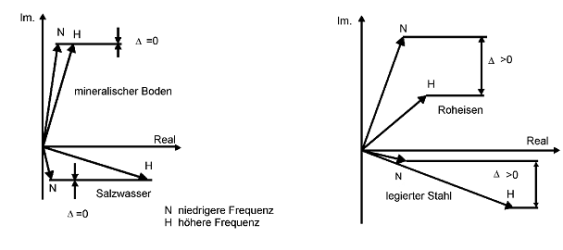
Abb. A-3.1-26: Arbeitsprinzip beim Zweifrequenzverfahren
Die Auswertung dieser Signale erfolgt mikroprozessorgesteuert durch driftkompensierende Phasendemodulation und nachfolgende Verstärkung. Als Signal erhält man für jede Spulenhälfte einen unterschiedlichen Ton. Der Störkörper befindet sich unter dem Mittelsteg der Spule, wenn keiner der Töne zu hören ist. Die Vorteile dieses Verfahrens bestehen vor allem in einer sehr genauen Lokalisierung der Störkörper (auch bei geringem Metallanteil) und in der sehr guten Trennung und Anzeige von dicht beieinander liegenden, unterschiedlich großen Körpern. Dazu gehört auch die Möglichkeit der Suche in unmittelbarer Nähe von Zäunen oder Leitungen. Ein weiterer Vorzug dieses Gerätetyps besteht in der zusätzlichen Kompensationsmöglichkeit von großflächigen schwachen Störungen, die
z. B. aus metallhaltigen Böden, verschiedenen Gesteinsarten oder Salzwasser resultieren können. Außerdem ist die abgestrahlte Leistung dieses Gerätetyps wesentlich geringer als beim Pulsinduktions- oder Dämpfungsverfahren, so dass eine zusätzliche Sicherheit gegenüber Minen mit magnetischen Zündern besteht.
3 Messgeräte
In der Kampfmittelbeseitigung spielen Metalldetektoren mit geringer Eindringtiefe (0,30 m) eine untergeordnete Rolle und werden nur zur Suche im oberflächennahen Bereich eingesetzt, wenn die Aufgabenstellung „metallfrei“ gefordert ist. Ihre Hauptverwendung finden sie im militärischen Bereich und in der humanitären Minenräumung. Tief eindringende Metalldetektoren (Großspulengeräte) nach dem Pulsinduktionsverfahren kommen dagegen immer häufiger auch bei der Kampfmittelsuche zum Einsatz.
In ihrem grundsätzlichen Aufbau unterscheidet sich die Vielzahl der angebotenen Geräte nicht. Sie bestehen aus den Hauptteilen (s. Abb. A-3.1-23):
- Suchspule,
- Tragerohr mit Griff und Armstütze,
- Elektronikteil mit Batteriefach,
- Zusatzteile wie Kopfhörer, Prüfmittel u. a.
- Bei zusätzlicher Messwerterfassung: Datenlogger.
Die Einsatzmasse der Geräte liegt zwischen 1,4 kg und 3,1 kg und muss eine ununterbrochene Nutzung unter komplizierten Bedingungen gewährleisten. Zur Stromversorgung werden handelsübliche Batterien oder (wieder aufladbare) Akkumulatoren gleicher Baugröße wie bei den Sonden verwendet. Die Batterien gewährleisten bei mittleren Temperaturen eine Arbeitsbereitschaft von 30 – 60 Stunden. Metalldetektoren haben eine einstellbare Empfindlichkeit, wobei immer mit der höchstmöglichen Stufe zu arbeiten ist. Besonders die nach dem Pulsinduktions- und dem Zweifrequenzverfahren arbeitenden Geräte ermöglichen eine Kompensation von Störungen durch metallhaltige Böden oder Salzwasser.
Einige Geräte sind mit Anschlussmöglichkeiten zur Datenaufnahme ausgestattet, wodurch eine profil- und flächenhafte Kartierung mit anschließender Auswertung und Interpretation der Daten möglich wird. Diese Methodik hat sich insbesondere bei der Verwendung von sog. tief eindringenden Metalldetektoren oder auch Großschleifen für die Lokalisierung von Blindgängern in größeren Tiefen bis ca. 3,0 m bewährt.
In Abb. A-3.1-27 ist schematisch ein tief eindringender Metalldetektor dargestellt (Knödel et al., 1997). Die fest montierten, getrennten Sende- und Empfangsspulen sind horizontal angeordnet (vertikaler magnetischer Dipol) und liegen direkt aufeinander (Coincident loop). Der Spulendurchmesser beträgt 1 m. Die Messelektronik ist tragbar. Gemessen wird die Induktionsspannung in der Empfangsspule. Die Messwerte werden zugleich akustisch und als Zahlenwert angezeigt sowie digital registriert, damit sie zur Verarbeitung an einen Kleincomputer weitergeleitet werden können. Es kann eine 2. Empfangsspule 40 cm oberhalb der Sende- und Empfangsspulen angebracht werden. Sie dient der Messwertaufnahme in einem 2. Abstand zum Untersuchungsobjekt. Zwei unterschiedliche Messhöhen ermöglichen eine bessere Tiefenabschätzung von detektierten Objekten und den Nachweis von oberflächennahen störenden Metallteilen.
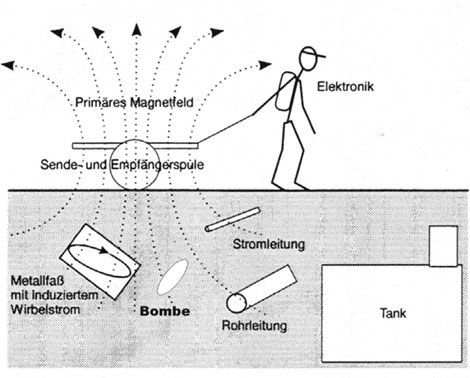
Abb. A-3.1-27: Schematische Funktionsweise und typische Untersuchungsobjekte des tiefeindringenden Metalldetektors (entnommen und modifiziert aus Knödel et al., 1997).
Abb. A-3.1-28 bis -32 zeigen verschiedene Ausführungen von Metalldetektoren unterschiedlicher Hersteller.
|
Abb. A-3.1 - 28: Großschleife UPEX 740 der Firma Ebinger (Foto: Neumann)
|
Abb. A-3.1 - 29: Großschleife VMX2 der Firma Vallon (Foto: Vallon)
|
|
Abb. A-3.1-30: Fahrzeuggestützter Metalldetektor VAMIDS der Firma Schiebel (Foto: Neumann)
|
Abb. A-3.1 - 31: Metalldetektor MIMID der Firma Schiebel (Foto: Neumann)
|





Abb. A-3.1-32: Metalldetektoren EM61 (Zwei-Spulensystem) und EM61-HH-MK2 der Firma Geonics (Foto: Krummel)
4 Durchführung von Feldmessungen
4.1 Voraussetzungen
Die Voraussetzungen zum Umgang mit Metalldetektoren sind prinzipiell die gleichen wie bei Eisendetektoren (s. A-3.1.6).
4.2 Feldmessungen
Bezüglich der Durchführung von Messungen gelten die gleichen Vorbereitungsarbeiten betreffend Markierung und Einteilung der Fläche in Spuren wie bei Eisendetektoren, lediglich die Spurbreite wird meist mit 2 m festgelegt und der Detektor ist in einer Höhe von 3–5 cm über den Erdboden zu schwenken oder zu führen. Dabei müssen sich die von der Suchspule überstrichenen Streifen überlappen.
Bei einer flächenhaften Messung mit computergestützter Messwerterfassung (s. a. Knödel et al., 1997) wird das Messgebiet mit der Sende-Empfangsspulen-Kombination abgegangen oder überfahren. Die Messzyklen sind sehr kurz, weswegen ein sehr hoher Messfortschritt möglich ist (z. B. halbe Schrittgeschwindigkeit). Die Dauer einer Untersuchung wird hauptsächlich bestimmt durch die Geländebeschaffenheit und den Aufwand für die Einmessarbeiten (Profile festlegen und dokumentieren).
Die Messungen finden entweder in bestimmten Zeit- (z. B. 0,5 s) oder Ortsabständen (z. B. 0,2 m) entlang von Messlinien als Profilierung oder flächendeckend als Kartierung statt. Bei Bedarf können erste Aussagen bereits vor Ort getroffen werden. Hierbei ist unter nicht zu schwierigen Messbedingungen eine akustische Anzeige hilfreich.
Die Messprofile sollten mögliche Leitungen oder sonstige in einer Richtung ausgedehnte Objekte senkrecht queren, damit deren Achse genauer angegeben werden kann. Zur vollständigen Erfassung der Objekte müssen die Profile bis in den ungestörten Bereich vermessen werden.
Bei einer flächendeckenden Untersuchung sollte der Profilabstand bei einem Spulendurchmesser von 1 m nicht größer als 1 m (besser 0,5 m) und bei einem Spulendurchmesser von 0,25 m nicht größer als 0,25 m sein.
Die Empfindlichkeit gegenüber seitlich befindlichen Störobjekten (Masten, Zäune, Fahrzeuge etc.) ist wegen der vertikalen Dipolausrichtung im Vergleich zur Geomagnetik gering. Erfahrungsgemäß reicht beispielsweise die Einhaltung eines Abstandes von 3 m zu einem PKW aus.
5 Interpretation der Messdaten bei computergestützter Erfassung
Die Messwerte (Induktionsspannung in der Empfangsspule in mV) werden als Isolinienplots in einem Lageplan dargestellt. In speziellen Fällen können die Daten zur Verminderung störenden Rauschens einer Filterung unterzogen werden. Das Metallobjekt befindet sich an der Stelle der maximalen Amplitude.
Die Genauigkeit der Ortsangabe in der Messebene liegt bei einigen cm für flachliegende Objekte bis zu wenigen dm bei größeren Objekttiefen. Die Tiefenlage wird aufgrund der Anomalienbreite näherungsweise ermittelt (Halbwertsbreite) und die Objektgröße ist aus der Anomalienamplitude abschätzbar.
6 Möglichkeiten und Grenzen der Anwendung
Metalldetektoren sind in der Lage, alle elektrisch leitfähigen Gegenstände bis in eine bestimmte Tiefe zu orten. Das vom Detektor ausgesendete hochfrequente Signal hat im Erdboden eine Reichweite von ca. 0,9 m. Man geht dabei davon aus, dass die Signalstärke auf eine Größe begrenzt sein muss, die unter der Ansprechempfindlichkeit von Frequenz-Induktionszündern von Minen liegt. Weitere Einflussgrößen auf die Tiefenreichweite sind die Größe, Struktur, Lage und Tiefe des Störkörpers. So werden, z. B. in geschichteten Körpern, geringere Wirbelströme erzeugt als in Vollmaterial und ein senkrecht im Boden stehender Körper ist bei gleicher Tiefe schlechter zu erfassen als ein waagerecht liegender. Die erreichbare Tiefe bei herkömmlichen Metalldetektoren wird allgemein mit maximal 0,4 m angegeben.
Geräte, die mit einer sog. Großschleife ausgerüstet sind und im Pulsinduktionsverfahren arbeiten, sind in der Lage, mittelgroße Störkörper auch bis ca. 2,5 m zu orten.
Grundsätzlich kann durch eine Vergrößerung des Spulendurchmessers und der Sendeleistung eine höhere Eindringtiefe erreicht werden. Hier sind jedoch physikalische Grenzen gesetzt. Zum einen fällt die Stärke eines elektromagnetischen Feldes mit 1/r³ in der Entfernung ab, d. h. bei einer Messung von der Erdoberfläche durch Hin- und Rücklauf (Oberfläche – Objekt – Oberfläche) mit 1/r6. Das bedeutet: um die gleiche Signalantwort aus 2 m wie aus 1 m Tiefe zu erhalten, muss die Sendeleistung um das 64-fache (!) vergrößert werden. Durch die Vergrößerung des Spulendurchmessers erhält man zwar eine größere Eindringtiefe, verliert aber im Gegenzug an räumlicher Auflösung. Gravierender ist noch, dass durch die größere „durchstrahlte“ Fläche eine Verrauschung der Messwerte zunimmt. Dies tritt auf, wenn das durch die Großspule durchstrahlte Bodenvolumen kleinräumige Leitfähigkeitsinhomogenitäten aufweist. Modellrechnungen zeigen, dass bereits Schwankungen von ca. 10-15% in der Leitfähigkeit des Bodens Messwertänderungen hervorrufen, die größer als die zu erwartenden Messwerte für die gesuchten Metallkörper sein können. In der Natur sind diese lokalen Leitfähigkeitsschwankungen gerade in oberflächennahen Bodenschichten häufig anzutreffen.
Auf dem Gebiet der aktiven Sensoren sind zukünftig Fortschritte zu erwarten. Dies gilt insbesondere für die Entwicklung von Messgeräten zur Erfassung der gesamten Abklingkurve durch die Aufzeichnung mehrerer Zeitfenster sowie für zugehörige Programme zur Auswertung der einzelnen Zeitkanäle mit einer entsprechenden Modellierung (auch Inversion) der Daten.
7 Beispiele
Ortung einer Fliegerbombe (100 lb) auf einem ehemaligen Militärgelände
Auf einem ehemaligen Militärgelände war aufgrund von Vorinformationen die ungefähre Lage einer Fliegerbombe aus dem Zweiten Weltkrieg bekannt. Mithilfe verschiedener geophysikalischer Verfahren wurde im Verdachtsbereich eine flächenhafte Kartierung durchgeführt (s. a. A-3.1.6). Hier werden die Ergebnisse mit dem Metalldetektor EM61 der Firma Geonics (s. Abb. A-3.1-32) vorgestellt.
Das EM61 arbeitet nach dem Pulsinduktionsverfahren. Der Spulendurchmesser beträgt 1 m (Großschleife). Zusätzlich ist im Abstand von 40 cm über der Sende-/Empfangsspule eine weitere Empfangsspule montiert, wodurch eine Tiefenbestimmung der Objekte ermöglicht wird.
Durch den großen Spulendurchmesser werden größere Eindringtiefen erreicht. Kleine metallische Objekte in Oberflächennähe werden durch die Spule nicht erfasst, so dass hier ein Filtereffekt entsteht, der größere Objekte hervorhebt.
Das Gerät kann u. a. in Verbindung mit einem Odometer (Wegmesser) benutzt werden, das in der Wagenachse montiert ist und eine Triggerung des Datenloggers alle 0,1 m oder 0,2 m ermöglicht. Das Messgerät ist relativ unempfindlich gegen laterale Einstreuung.
Abb. A-3.1-33 zeigt die Ergebnisse der Kartierung mit dem EM61. Dargestellt sind die Rohdaten inkl. der Auswertung mit der Software Oasis Montaj der Firma Geosoft (Modul zur UXO-Detektion mit dem Gerät EM61). Die gefundenen Targets sind in Abb. A-3.1-33 durch gelbe Punkte gekennzeichnet. Es werden 3 Targets durch die automatische Auswertung gefunden. Ein Blick auf die Anomalienkarte (Abb. A-3.1-33) zeigt, dass nur die Anomalie zum Target mit den Koordinaten x = 3,2 und y = 3,4 eine relevante Stärke besitzt. Die Tiefenbestimmung ergibt einen Wert von 1,6 m. Tabelle A-3.1-6 enthält die Informationen zu den automatisch gefundenen Targets noch einmal im Überblick.
Bei dem Objekt handelte es sich um eine waagerecht liegende 100 lb-Bombe in 1,5 m Tiefe.
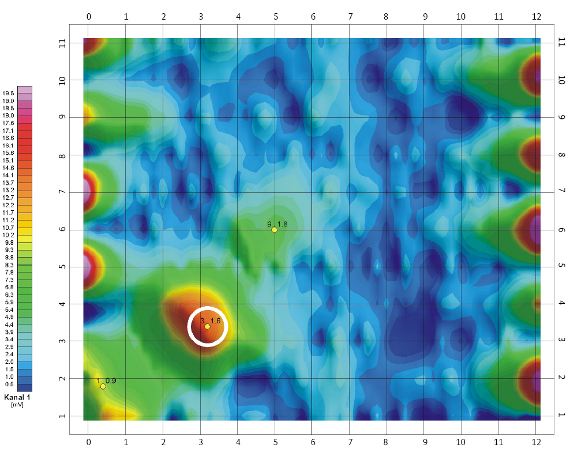
Abb. A-3.1-33: EM61: Rohdaten inkl. Auswertung. Bei
dem markierten Objekt handelt es sich um eine waagerecht liegende 100 lb-Bombe
in 1,5 m Tiefe.
|
X |
Y |
Bottom_grid |
EM_Depth |
Target_ID |
Top_grid |
|
0,4 |
1,8 |
6,5 |
0,9 |
1 |
9,1 |
|
3,2 |
3,4 |
8,4 |
1,6 |
3 |
14,1 |
|
5 |
6 |
3,4 |
1,8 |
9 |
5,9 |
Aus Vergleichsgründen wurde die Bombe nach der Bergung noch einmal in 1,5 m Tiefe, jedoch um 45° gekippt, in den Boden eingebracht. Danach wurde erneut eine Messung mit dem EM61 durchgeführt und eine automatische Identifizierung der Targets vorgenommen. Auch hier tritt nur eine Anomalie mit relevanten Werten auf, deren Zentrum der Lage der Bombe entspricht. Die Tiefenbestimmung ergibt 1,2 m. Im Vergleich zur waagerecht liegenden Bombe erzeugt die gekippt liegende Bombe ein höheres (stärkeres) Signal.
Zusammenfassend lässt sich sagen, dass der Einsatz eines tief eindringenden Metalldetektors (Großschleife nach dem Pulsinduktionsverfahren) zur Blindgängersuche sehr gut geeignet ist. Die Genauigkeit der Tiefenbestimmung aus den EM61-Daten mit 1,6 m bzw. 1,2 m ist hier ebenfalls gut. Da das Messsystem unempfindlich gegen den Störeinfluss kleiner oberflächennaher Metallobjekte ist, ergibt sich ein im Gegensatz zur Magnetik klareres und eindeutigeres Anomalienbild. Die Zahl der gefundenen Targets wurde zusätzlich dadurch begrenzt, dass nur Anomalien von relevanter Stärke berücksichtigt wurden. Das EM61 besitzt eine sehr hohe Dynamik bei der Messdatenerfassung. Es ist speziell für die Detektion von metallischen Objekten in 0,5 m bis 2,5 m Tiefe konzipiert.
Ortung von Splitterbomben in der Erdbedeckung von Bunkern
Auf einem Militärgelände befindet sich ein Munitionsbunker, der nach seiner Fertigstellung mit Erde bedeckt wurde. In den oberen 0,3 m der ca. 1 m mächtigen Erdbedeckung können sich Kampfmittel befinden. Dabei handelt es sich überwiegend um Splitterbomben vom Typ SD 1 (1 kg). Vereinzelt können auch Bomben vom Typ SD 2 (2 kg) auftreten.
Mithilfe von geophysikalischen Messungen sollte eine Lokalisierung der Splitterbomben erfolgen. Abb. A-3.1-34 zeigt die Untersuchungsfläche mit einer Größe von ca. 360 m2, in dessen Zentrum sich der ehemalige Munitionsbunker befindet. Die Stahlbewehrung des Bunkers sowie dessen unterirdische Blitzschutzanlagen machen eine Ortung der Kampfmittel mit herkömmlichen Metallsuchgeräten unmöglich.

Abb. A-3.1-34: Untersuchungsgelände, Bereich des ehemaligen Munitionsbunkers (Foto: Krummel)
Zum Einsatz kam eine flächenhafte digitale magnetische und elektromagnetische Aufnahme des Geländes mit einem Fluxgatemagnetometer vom Typ FM36 der Firma Geoscan Research (Gradiometer) und einem EM61-HH-MK2 der Firma Geonics (Metallsuchgerät auf der Basis des Pulsinduktionsverfahrens).
Das EM61-HH-MK2 ist so konzipiert, dass es eine hohe Sensitivität für kleine Metallobjekte in geringen Tiefen besitzt. Die Daten werden von einer Empfängerspule in vier Zeitfenstern nach dem Abschalten des Sendepulses aufgenommen. Die Informationen von vier Zeitfenstern ermöglichen eine Unterscheidung der Metallobjekte nach ihrer Größe. Die frühen Zeitfenster orten sowohl kleine als auch große Objekte, während die späteren Zeitfenster nur größere Objekte anzeigen.
Das EM61-HH-MK2 kann in Verbindung mit einem Odometer (Wegmesser) benutzt werden, das in einer Wagenachse montiert ist und eine Triggerung des Datenloggers alle 0,1 m oder 0,2 m ermöglicht.
Die Messungen erfolgten auf einem flächenhaften Raster mit einem Messpunktabstand von 0,1 m und einem Profillinienabstand von 0,25 m. Die Triggerung des Datenloggers erfolgte durch das Odometer. Bei Hindernissen wie Bäumen bzw. den Lüftungsschächten wurde eine Messlücke eingefügt.
Die Auswertung der Magnetik ergab keine brauchbaren Ergebnisse. Aufgrund der Stahlbewehrung und des unterirdischen Blitzschutzsystems ist das Anomalienbild sehr unruhig und daher nicht interpretierbar.
Die Ergebnisse der EM-Kartierung (Abb. A-3.1-35) zeigen deutliche symmetrische Strukturen, die auf das Bunkergebäude selbst und das dazugehörige unterirdische Blitzableitersystem zurückzuführen sind. So läuft rings um den Bunker am Rande der Untersuchungsfläche ein unterirdisches Metallband, das mit den Blitzableitern der Entlüftungsschächte „sternförmig“ verbunden ist.
Im Weiteren treten singuläre Anomalien auf, die als kritische Punkte für mögliche Kampfmittel anzusehen sind. Zur Auswertung wurden die aufgenommenen Einzelspuren auf typische Anomalieverläufe hin untersucht und ihre Lokation in die flächenhafte Darstellung projiziert. Durch den Vergleich der Messergebnisse der Einzelspuren mit der flächenhaften Anomaliendarstellung wurden Verdachtspunkte festgelegt und im Gelände markiert. In Abb. A-3.1-35 sind diese in ihrer Lage auf der Untersuchungsfläche markiert. Bei der anschließenden Aufgrabung und Überprüfung der Punkte wurden 6 Splitterbomben vom Typ SD1 gefunden (Abb. A-3.1-36).
Insgesamt kann festgehalten werden, dass die Vermessung mit dem EM61-HH-MK2 klare Resultate über die Lage von oberflächennahen metallischen Objekten im Untergrund bringt und eine relativ einfache Ansprache von möglichen Kampfmitteln im Untergrund ermöglicht.
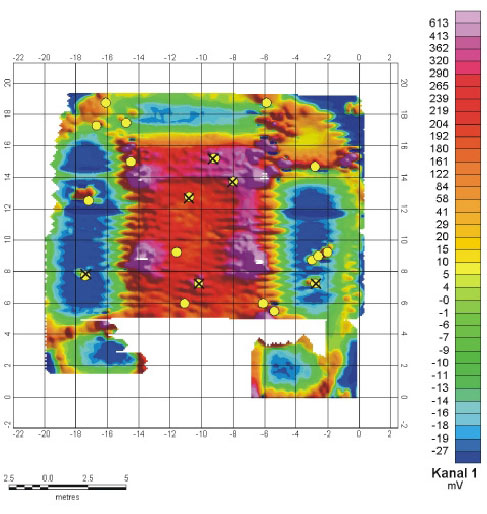
Abb. A-3.1-35: Ergebnis der elektromagnetischen Kartierung der Untersuchungsfläche Munitionsbunker (vgl. Abb. A-3.1-34) mit Interpretation der Verdachtsstellen (gelbe Punkte) auf Kampfmittel. Fundstellen von Splitterbomben (Typ SD1) sind mit einem zusätzlichen schwarzen Kreuz markiert.

Abb. A-3.1-36: Markierung einer Verdachtsstelle im Gelände auf Basis der elektromagnetischen Kartierung aus Abb. A-3.1 - 35, geborgenes Fundobjekt (SD1) (Fotos: Krummel)
Vergleichende Messungen auf einem Testfeld
Auf dem Truppenübungsplatz Bergen in Niedersachsen wurde ein Testfeld angelegt, das von der geoFact GmbH für vergleichende Messungen mit unterschiedlicher Detektionstechnik genutzt wurde. Das Testfeld hatte eine Ausdehnung von 60 x 80 m und war mit Testkörpern präpariert, die in Tiefen von 0 - 2 m eingebaut waren. Bei den Testkörpern handelte es sich um Granaten im Kaliber von 2 bis 12 cm, die als Einzelkörper oder in Form von Anhäufungen im Boden lagen. In Abb. A-3.1-37 werden die Ergebnisse der Messungen mit einem magnetischen (links) und elektromagnetischen (rechts) Verfahren gezeigt.
Mit der Magnetik werden ausschließlich Fe-Störkörper detektiert, wobei auch aus der Geologie herrührende Kontraste wie bespielsweise Steine mit Anteilen an ferrimagnetischen Mineralen registriert werden. Im Vergleich mit der Elektromagnetik ist die Erkundungstiefe der Magnetik größer.
Mit der Elektromagnetik werden zusätzlich zu den Fe-Metallen auch Nichteisenmetalle detektiert, wobei hier die Einflüsse des natürlichen Untergrunds schwächer sind. Die Erkundungstiefe ist deutlich geringer als die der Magnetik. Die Messungen werden deutlich weniger als bei der Magnetik von seitlichen Störkörpern beeinflusst, woraus eine höhere laterale Auflösung auch von kleinen Objekten resultiert. In der Abbildung ist gut erkennbar, dass mit der Elektromagnetik eine lagegenaue, präzise und gut abgegrenzte Darstellung auch von kleineren Testkörpern erzielt wird.
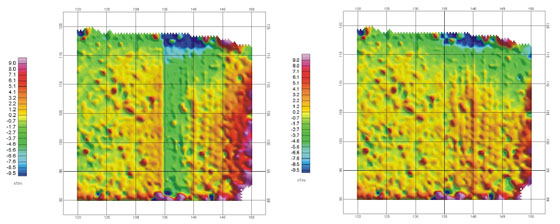
Abb. A-3.1-37: Ergebnis vergleichender Messungen mit Magnetik und Elektromagnetik. Das linke Bild zeigt die Auswertung einer Magnetik-Messung (Gradiometer) mit der Ferex-Sonde der Fa. Förster und das rechte Bild eine elektromagnetische Messung mit dem EM 61 von Geonics (Messung und Auswertung: geoFact GmbH).